
Job Projekte #2 Linearstativ für Zeiss T-Scan

Vorgeschichte:
Dieses Projekt war, wie es bei uns so üblich ist ganz spezieller Natur. Die Firma hatte sich einen Zeiss T-Scan zur Digitalisierung und Vermessung von Bauteilen angeschafft bei denen es maßlich nicht auf das letzte µ ankommt. Dabei habe sie festgestellt, dass das im Lieferumfang befindliche Stativ für unsere Bauteilgrößen doch zu niedrig ist und es doch toll wäre den Scanner in der Höhe verfahren zu können. Zum Scanner selbst sei erwähnt das er mit einem 3D Kamerasystem die Bauteile vermisst und es noch ein Handmessgerät dazu gibt für die Punkte welche nicht direkt erfasst werden können. Die Lage des Handgerätes im Raum wird über IR-Led´s ermittelt welche sich am Gehäuse befinden. Das funktioniert ähnlich wie in der Filmindustrie in der Animationstechnik. Da wie das halt so ist kein Budget dafür eingeplant war sollte es mal wieder ein „Lehrlingsprojekt“ werden.
Die Anforderungen
Die Aufgabenstellung war, dass sich der Scanner mittel Tastendruck in variabler Geschwindigkeit vertikal mit einem Linearantrieb (noch ohne Motor) für den noch Geld da war bewegen sollte. Dabei sollte auch die Höhe angezeigt werden, die Sicherheit für Mensch und Scanner (nur der Kopf kostet 35k Euronen) musste gegeben sein und kosten durfte das Ganze natürlich auch eigentlich nix. Ich weiß nicht was ihr in euren Betrieben für Lehrlinge als Zauberer habt, aber für unsere war das definitiv eine Nummer zu groß. Also landete das auf meinem Tisch und sollte um max. 2500€ realisiert werden.
Die Lösung der Aufgabe
Meine Möglichkeiten waren also finanziell sehr eingeschränkt. Um die Aufgabe zu lösen musste ein Antriebskonzept her welches auf jeden Fall ohne zusätzliche Steuerung auskam da die den Rahmen auf jeden fall gesprengt hätte. Somit ist man da aber sehr eingeschränkt. Als Antriebslösung habe ich mich dann für einen Motor von Lenze entschieden bei dem eine Bremse und ein Encoder bereits verbaut waren. Für den Antriebsregler habe ich mich dann für einen Lenze 8400 Highline mit Safe Torque Off Funktion entschieden. Das hat den Grund das die STO Funktion , also der Not-Halt Leistungsteilseitig schon integriert ist und man in den Lenze Umrichtern noch einiges an Steuerlogik im Umrichter selbst & frei Programmieren kann ohne eine externe SPS zu brauchen. In der Software heißt das dann „abgeänderte Applikationsverschaltung“.
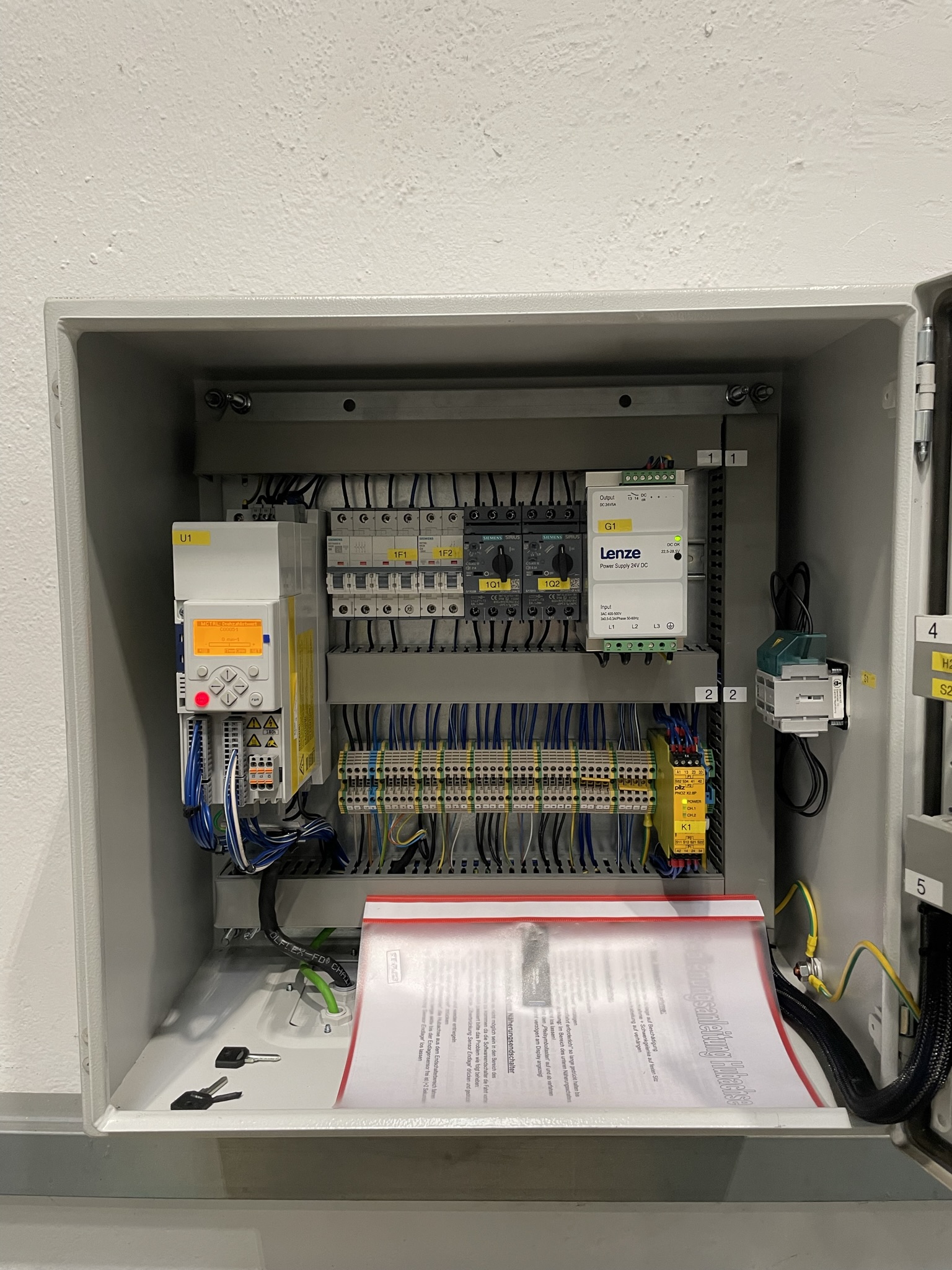
Vom Hardwareaufbau her bekam der Linearantrieb 2 Stk. 2 kanalige Endlagenschalter welche im Zusammenspiel mit dem Not-Aus Taster und einem Pilz-Relais die Sicherheit übernehmen. Das Abfallen des Pilz Relais nimmt dem Umrichter die Reglerfreigabe und die 2 x 24V für die STO Abschaltkanäle. Dann wurden noch zwei induktive Näherungsschalter montiert, der eine oben vor dem Not-Endlagenschalter und der zweite unten vor der Notendlage. Beide dienen als Hardwareendlage, wobei der untere auch noch die Funktion als Referenzpunkt für das Messsystem hat. Der wird im Referenzierbetrieb einmal betätigt und automatisch wieder frei gefahren. Als zusätzliche Sicherheit gibt es auch eine Softwareendlage durch die ein Betätigen der Hardwareendlagen eigentlich vermieden werden soll.

Bei der Betätigung der Richtungstasten wird den Umrichter in den Jog-Betrieb (Handbetrieb) gesetzt. Die ersten 5 Sekunden bewegt sich der Antrieb mit relativ geringer Geschwindigkeit und beginnt dann zu beschleunigen. Nun sollte ja noch angezeigt werden auf welcher Position sich der Schlitten mit dem Scanner befindet. Dazu habe ich den 0-10V Ausgang des Umrichters genutzt den ich auf eine Spannungsanzeige von Kübler gelegt habe. Intern habe ich die 4500mm auf den wert für den Analogausgang umgerechnet. Leider hat der Ausgang einen großen Nachteil, der AD Wandler hat nur 8 Bit wodurch ich einiges an Auflösung verliere. War aber nicht schlimm da die Alternative gewesen wäre ein Maßband auf die Achse zu kleben. Leider habe davon aktuell kein Bild bei der Hand
Da der Schlitten über einen Zahnriemen angetrieben wird und sich der Scanner bei einem Riemenbruch in den Boden bohren würde hat er noch eine mechanische Absturzsicherung bekommen. Diese besteht aus einer Personenabsturzsicherung welche bei uns nicht mehr benötigt wurde. Wird das Seil zu schnell aus dem Sicherungsgerät ausgezogen blockiert es und verhindert einen weiteren Absturz. Eine andere mechanische Herausforderung war den Linearantrieb an der 165 Jahre alten Mauer zum Halten zu bekommen. Aber dank Hilti HIT und einigen Gewindestangen wurde das Problem auch gelöst.
Fazit :
Die Anlage läuft jetzt eigentlich seit Jahren störungsfrei und es gab eigentlich keine Beschwerden. Das einzigen Problem war der Kasten, welchen die Bediener in der Verfahrbereich montiert haben, da mussten die Endlagen nochmal angepasst werden. Ich hoffe doch, dass mir das Lehrlingsprojekt ganz gut gelungen ist 🙂 .