
Job Projekte #3 AI ist NOT watching you – Cam Shutter

Vorgeschichte:
Bedingt durch Industrie 4.0 häufen sich auch bei uns die Projekte, in denen künstliche Intelligenzen immer mehr eine Rolle spielen. Bei den meisten Aufgaben für die KI´s handelt es sich um irgendwelche Kontroll- und Überwachungsmechanismen. Um diese Aufgaben zu erfüllen reicht die „Standardsensorik“ oft nicht nicht mehr aus, somit erfordern gewisse Aufgaben „echte Augen“ für den blechernen Mitarbeiter. In dem konkreten Fall geht es darum, dass der digitale Mitarbeiter die Bewegungen eines Schweißroboters analysieren und optimieren soll. In dem Raum wo Mensch und Maschine mit Augen zusammen arbeiten sollen stößt man auf rechtliche und persönliche Probleme.
Die Problemstellung:
Die Roboterzelle, die von Mensch und KI gemeinsam genutzt werden soll hat die rechtliche Auflage, dass die Personen, wenn sie den Arbeitsraum betreten, nicht gefilmt werden dürfen. Was die persönliche Seite angeht so haben gewisse Menschen Angst davor was man nicht alles böses mit dem Videomaterial anfangen könnte auf dem sie zu sehen sind. Um das alles zu vermeiden war der ursprüngliche Plan von dem Projektteam, dass im JOG Modus die Spannung vom POE Injektor der Cam ausgeschaltet wird. Wie ich ihnen erklären durfte ist das ein suboptimale Idee und zwar aus folgenden Gründen:
- Es wird häufig und schnell zwischen Auto und JOG geschaltet
- Dauerndes Spannung aus und wieder ein tut dem Prozessor der Kamera sicher nicht gut
- Die Kamera muss sich jedes mal am Netzwerk neu anmelden
- Es gehen mind. 2 Minuten bei jedem Neustart an Filmmaterial für die KI verloren
Eigentlich wollte ich nur Ideen spenden und mich aus der Geschichte raus halten. Funktionierte wieder mal ganz toll …. nicht !
Mein Lösungsansatz:
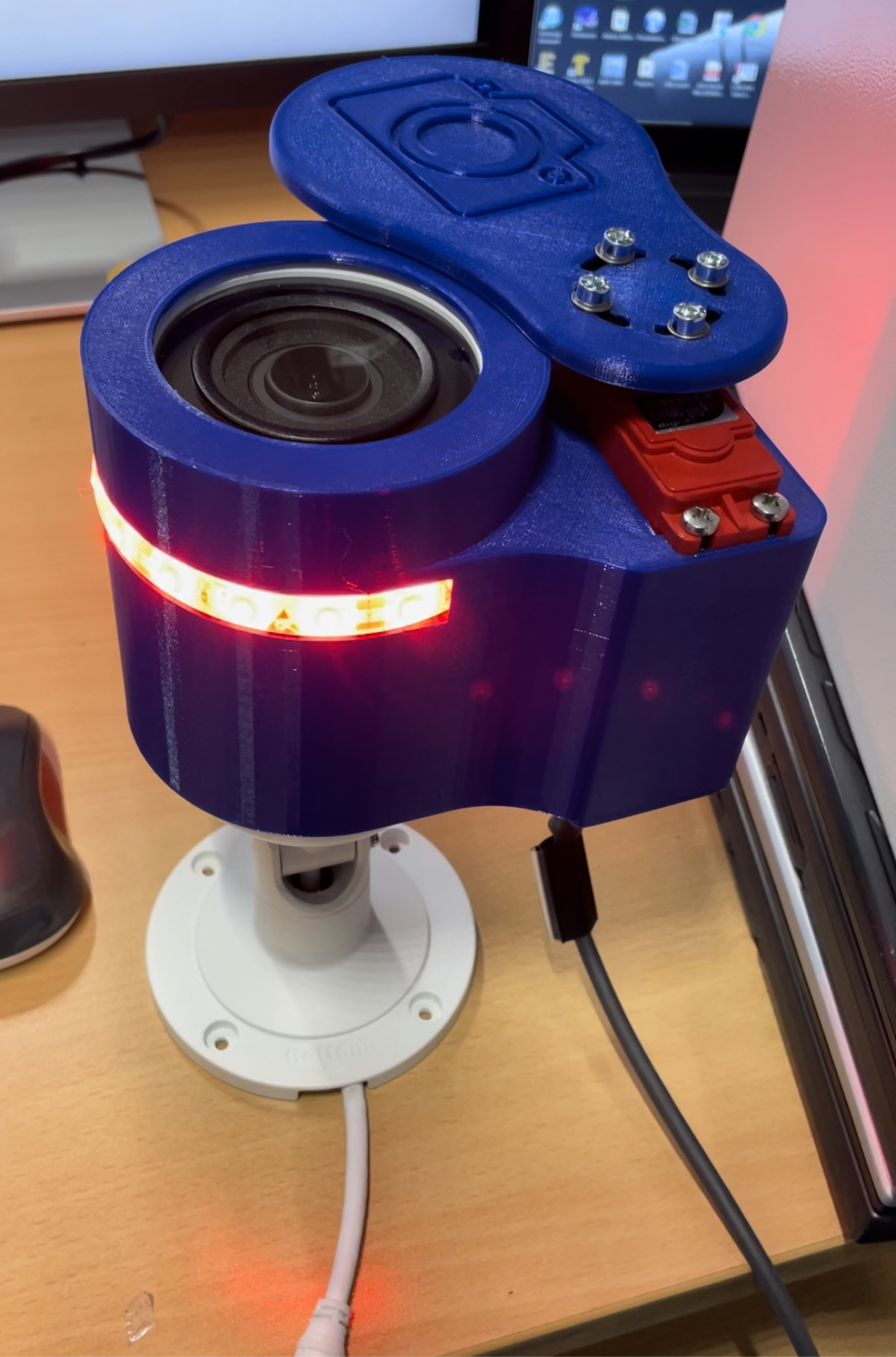
Da man die Kamera so nicht schalten konnte und es keine andere Möglichkeit gab die KI Blind zu machen, brachte ich als Lösung einen elektromechanischen Shutter, wie man sie von Laseranlagen kennt um den Strahl zu blockieren, ins Gespräch. Ursprünglich dachte ich, dass sich das damit für mich erledigt hätte, bis mich der Anruf ereilte, dass sie sowas nicht besorgen können und wir eine Lösung brauchen. Somit sollte es eine Bastel-Sonderlösung werden. Ein Zusatzwunsch war auch, dass die Shutterposition optisch signalisiert werden soll, so wie die berühmte rote Leuchte bei der Fernsehkamera. Wie üblich durfte die ganze Geschichte nicht zu viel kosten und was die Lieferanten angeht sind wir auch sehr beschränkt. Um die mechanische Bewegung auszuführen wählte ich ein Modellbauservo, dies hatte den Hintergrund, dass es gar nicht sicher war ob die Webcam und deren Weißabgleich mit den Lichtbogen zurechtkommen würde. Ich könnte also auch ein UV Sperrfilter davor positionieren falls das einmal nötig werden würde. Die Form der Kamera war mal wieder sehr undankbar um daran etwas zu montieren, was es nötig machte die ganze Halterung mit Fusion 360 und dem 3D Drucker herzustellen.
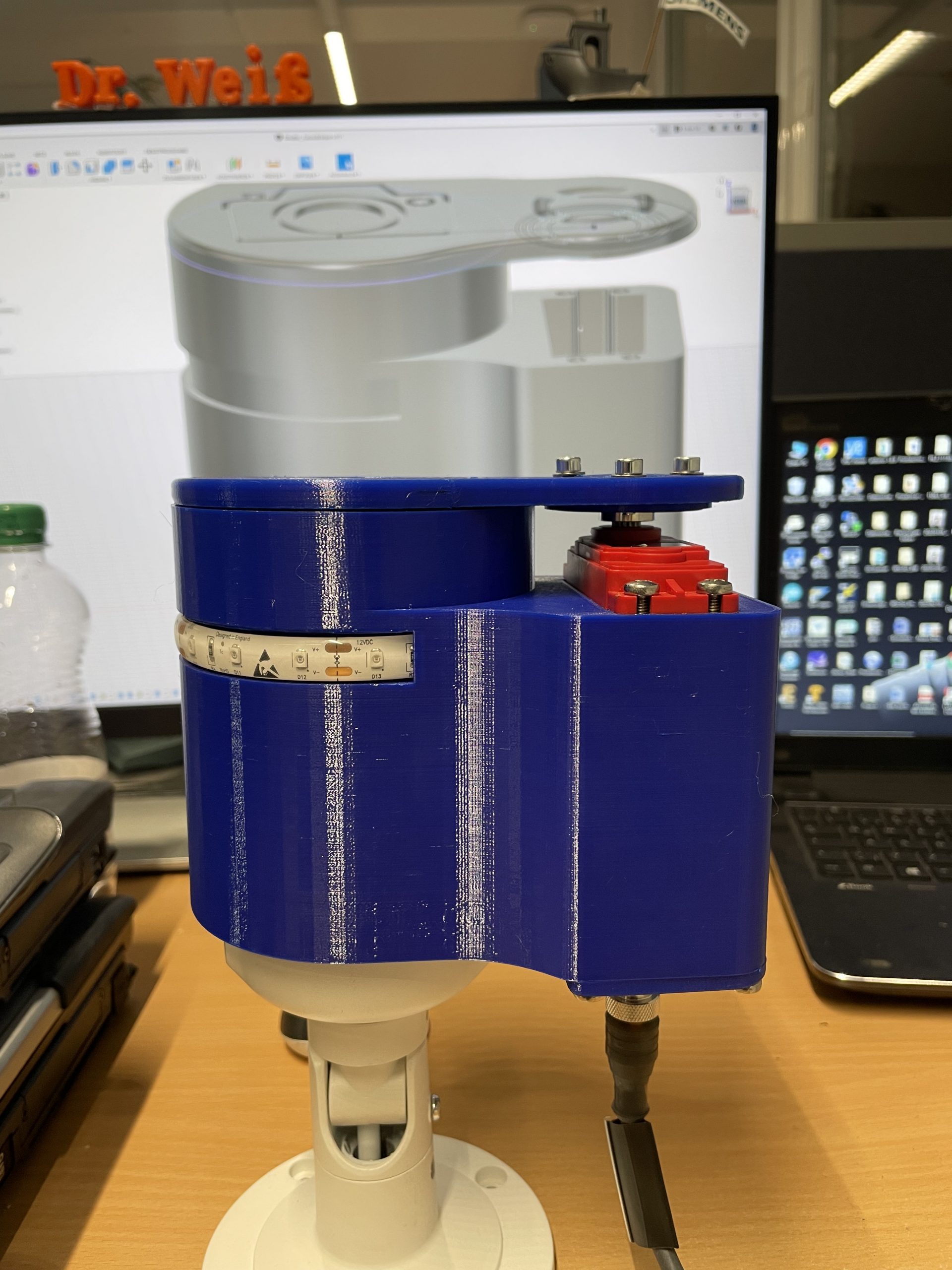
Für die optische Signalisierung habe ich einen roten Led Streifen in das Gehäuse eingelassen. Auf der Rückseite der Konstruktion befindet sich ein fünfpoliger M12 Steckverbinder als Anschluss und der Raum zwischen dem Servo und der Rückwand dient als Verdrahtungsraum. Befestigt wird das ganze Teil an der Kamera mit nur 2 Schrauben, eine davon diente ursprünglich zur Montage des Sonnenschutzes. Für alle anderen Schraubverbindungen wurden Einschmelzmuttern in den Druck eingelassen. 230Grad Lötkolbentemperatur erwiesen sich dafür als ideal. Das Ding wurde übrigens aus PTEG gedruckt.

Als Steuerung dafür diente ein einfacher Arduino Uno und für das Signal, das der Roboter im Automatikbetrieb ist lieferte dieser einen potentialfreien Kontakt. Die Stromversorgung erledigen 2 Logo!Power Industrienetzteile. Das eine mit 12V versorgt den Arduino inkl. Led Streifen und das mit 5V Ausgangsspannung versorgt das Servo, wobei ich es auf 6V hochgedreht habe um dem MPX Rhino eine passendere Arbeitsspannung zu bieten. Bei der Inbetriebnahme stieß ich auf ein unerwartetes Problem. Das Servo positionierte einfach nicht, was zuerst etwas Kopfzerbrechen machte, aber die Ursache war dann schnell gefunden. Dieses Servo kann es gar nicht leiden wenn man das PWM Signal sprunghaft ändert. Hab dann mein Programm so angepasst, dass es eine kontinuierliche Signaländerung bis zur Zielposition gibt.
Fazit:
Das Bastelprojekt befindet sich derzeit in der Erprobungsphase und bis jetzt schaut alles gut aus. Ob die anderen Anlagen dann so ausgerüstet werden wird sich zeigen.